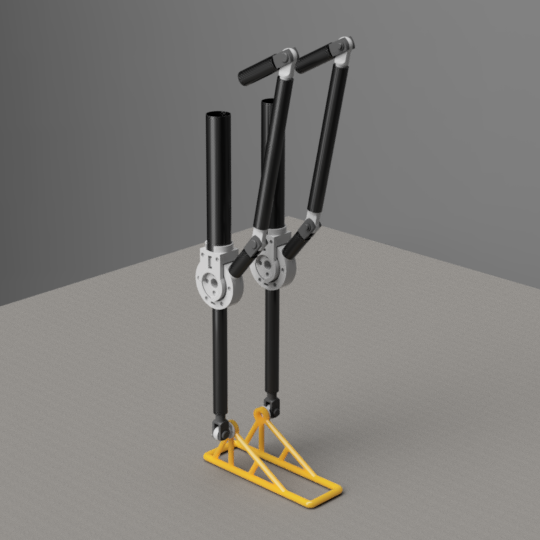
Hybrid serial-parallel legs
A hybrid serial-parallel leg design allows most of the actuators to be placed in the hip, resulting in a lighter structure.
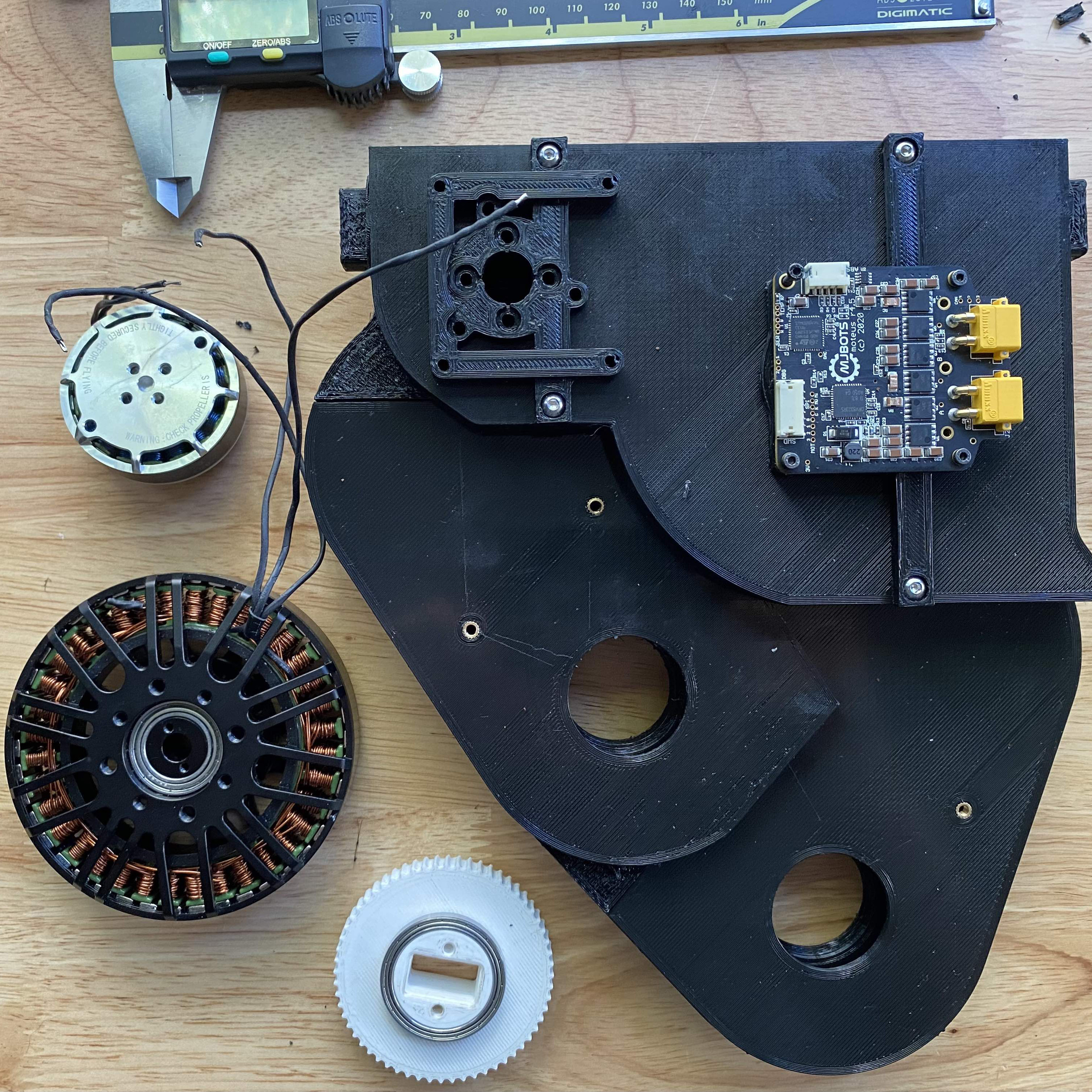
BLDC motor controller
We use open-source, commercially available controllers for brushless motors, designed for legged robotics projects.
Open-source design
Free to use however you want (BSD License), and inspired by other high-quality open-source robotics projects, for an affordable build.
The Biped Open Platform Project started with the idea to create an affordable yet capable platform for research in robotics and 2-legged locomotion. The components are mostly either 3d-printable, open-source, or off-the-shelf hardware. We’re just getting started! At present, the project is in an early and untested stage, with many parts still undergoing active design, testing, and changes. We make both early concepts and current versions available to allow reproduction, contributions, or spin-off projects. If you like or use this project, we’d love to hear about it!